OpenMind完全ガイド:実体知能向けグローバルオペレーティングシステムと信頼ネットワークの構築
なぜオープンロボティクス時代が不可欠なのか
今後5~8年で、世界のロボット数は10億台を超えると予測されています。これは、ロボットが単なる個別デモから社会の労働分担の不可欠な担い手へと進化する転換点です。今後は、ロボットは組立ラインの機械アームにとどまらず、同僚や教師、パートナーとして、人間と共に感知・理解・意思決定・協働する存在となります。
ロボティクスのハードウェアは近年著しく進化し、器用なハンドや安定した移動能力、高度なセンサー性能を獲得しています。しかし、真のボトルネックはハードウェアではなく、ロボット同士が知識を共有し、協働できるかどうかという点です。
- メーカーごとに異なるソフトウェアの非互換性が、ロボット間のスキル・知能共有を阻んでいます。
- 意思決定ロジックがクローズドシステム内に閉ざされ、外部からの検証や最適化ができません。
- 中央集権型の制御アーキテクチャがイノベーションを阻害し、信頼構築の障壁を高めています。
こうした断片化は、ロボティクス業界がAIの飛躍的進歩を大規模な生産性向上に結び付けることを妨げています。無数の単独デモロボットが登場しても、機種を超えた移植性や検証可能な意思決定、標準的な協働が不可能なため、真のスケーラビリティに至りません。OpenMindはこの「ラストマイル」問題の解決に挑戦しています。当社の使命は、単により優れたロボットを作ることではなく、世界中で多様なロボットに統一されたソフトウェア基盤と協働標準をもたらすことです。
- ロボット同士が状況を理解し、相互に学び合える環境の実現
- 開発者がオープンソースかつモジュール型プラットフォームでアプリケーションを迅速に構築できるよう支援
- 人とマシンが分散型プロトコル下で安全に協働・取引できる仕組みの提供
要するに、OpenMindはロボットのためのユニバーサルOSを構築しており、知覚と行動だけでなく、あらゆる環境下での分散協調による安全かつ大規模な協働を可能とします。
このビジョンに賭けるのは誰か: 2,000万ドルの資金調達とグローバルな陣容
OpenMindはPantera Capital主導のもと、2,000万ドルのシードおよびシリーズA資金調達に成功しました。世界の有力なテクノロジー・投資リーダーが参加しています。
- 欧米のテック系投資家: Ribbit、Coinbase Ventures、DCG、Lightspeed Faction、Anagram、Pi Network Ventures、Topology、Primitive Ventures、Amber Groupなど。これらの企業は暗号通貨およびAIインフラの長期的な推進役であり、「エージェント経済」「マシンインターネット」の新潮流を支えています。
- アジアの産業系大手: Sequoia Chinaほか、ロボティクスのサプライチェーンや製造に精通し、大量生産・提供における現実的な課題とハードルを熟知した巨大企業が参画しています。
同時に、OpenMindはKraneSharesのような伝統的金融市場参加者と連携し、「ロボティクス+AIエージェント」による長期価値を構造化金融商品に組み込む道を探り、暗号資産と株式市場の橋渡しにも取り組んでいます。2025年6月にKraneSharesがGlobal Humanoid & Embodied Intelligence Index ETF(KOID)を立ち上げた際、OpenMindとRoboStoreが共同開発した人型ロボット「Iris」がNASDAQのオープニングベルを鳴らしました。これは同市場史上初めて人型ロボットがこの式典を行った歴史的瞬間です。
Pantera Capitalのパートナー、Nihal Maunderは次のように述べています。
「もしインテリジェントマシンにオープンな環境で活動してもらうなら、オープンな知能ネットワークが必須です。OpenMindがロボットのために取り組んでいることは、ソフトウェア界のLinuxやブロックチェーン界のEthereumと同じ役割を果たします。」
チームおよび助言者: 研究室から生産現場まで
OpenMind創業者Jan Liphardtは、スタンフォード大学准教授であり、元バークレー大学教授としてデータおよび分散システムに精通し、学術・エンジニアリング両面で豊富な経験を有します。彼はブラックボックス化したシステムを監査・追跡可能な形でオープンソース化し、AI・ロボティクス・暗号技術の融合を推進しています。
コアチームはOKX Ventures、Oxford Robotics Institute、Palantir、Databricks、Perplexityなど多彩なバックグラウンドを持つ人材で構成され、ロボット制御、認識・ナビゲーション、マルチモーダル・LLMオーケストレーション、分散システム、オンチェーンプロトコルなど主要分野をカバーします。助言者には、Stanfordロボティクス部門長Steve Cousins、Oxford Blockchain CenterのBill Roscoe、Imperial CollegeのSafe AI担当教授Alessio Lomuscioらが名を連ね、OpenMindのロボティクス・ソリューションの安全性・コンプライアンス・信頼性を担保しています。
OpenMindのソリューション: 2層構造による統一協働
OpenMindは、ロボットがデバイス・メーカー・国の壁を越えて協働・情報交換できる再利用型インフラフレームワークを開発しています。
- デバイス側: OM1は現実世界向けAIネイティブOSで、認識から実行までを一貫して制御し、あらゆる姿のロボットが環境を理解しタスクをこなします。
- ネットワーク側: FABRICは分散型協働ネットワークで、ロボット同士のID・タスク割当・通信を司り、ロボットが相互認識・タスク割当・状態共有をリアルタイムで実現します。
この「OS+ネットワーク層」のアプローチにより、ロボットは自律行動だけでなく、統合ネットワーク内でワークフローを連携し、複雑なタスクを協調して遂行できます。
OM1: 現実世界向けAIネイティブOS
スマートフォンにiOSやAndroidが必要なように、ロボットにもAIモデルの展開・センサーデータ処理・推論・実行ができるOSが不可欠です。
OM1は現実世界のロボット向けに設計されたAIネイティブOSで、知覚・理解・計画・実行を可能にします。従来のクローズドなロボット制御とは異なり、OM1はオープンソース、モジュール式、ハードウェア非依存型で、人型ロボット・四足歩行・車輪型・ロボットアームなど多様な機種をサポートします。
4つの基本ステップ: 知覚から行動へ
OM1はロボット知能を「知覚→記憶→計画→行動」の4段階に分け、それぞれのモジュールを標準データ言語で統一することで、インテリジェンスの組み合わせや検証を柔軟に行えます。
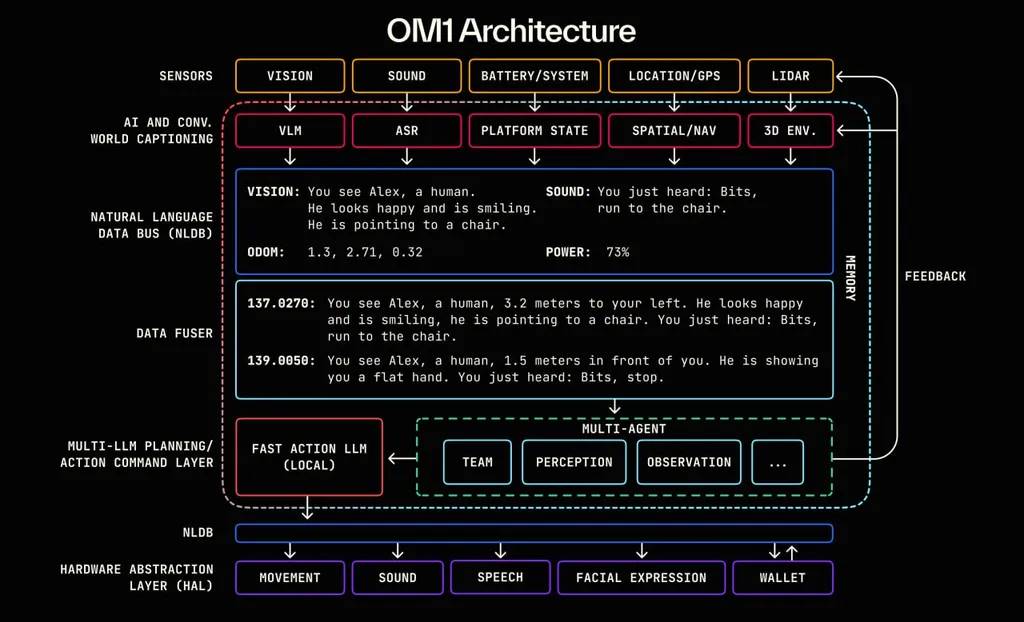
OM1アーキテクチャ
OM1の7層構造:
- センサー層: カメラ、LiDAR、マイク、バッテリー、GPSなどからマルチモーダルデータを取得
- AIと環境認識層: 各種データを自然言語説明(例:「人が手を振っている」)に変換
- 自然言語データバス: あらゆる知覚データをタイムスタンプ付きセンテンスとしてモジュール間で流通
- データフューザー: 各種入力を融合し、次工程の判断用コンテクストを生成
- マルチAI計画・意思決定層: 複数LLMが状況を解釈し、オンチェーンルールに沿ってアクションをプランニング
- NLDB下流チャンネル: 判断結果を言語的にハードウェア制御系へ中継
- ハードウェア抽象化層: 言語コマンドを制御信号(移動・発話・オンチェーン取引等)へ変換
迅速な導入と幅広い展開
OM1は、アイデアを迅速にロボット実行タスクへ変換できる組み込みツールを備えています。
- スキルの高速展開: 自然言語と大規模モデルで、数時間で新しい行動を追加可能
- マルチモーダル融合: LiDAR・映像・音声など複数センサーの統合をノーコードで実現
- 大規模モデルAPI連携: GPT-4o、DeepSeek、VLMs等の音声・画像モデルとの連携をサポート
- 幅広いハード/ソフト互換性: ROS2やCyclone DDSなど主要プロトコルに対応し、Unitree G1人型ロボット、Go2四足歩行、Turtlebot、ロボットアーム等幅広い機種をネイティブに接続可能
- FABRIC連携: OM1はID・タスク協調・オンチェーン決済をネイティブサポートし、グローバル協働ネットワーク参加や単体運用も実現
OM1は実社会の現場ですでに活用されています。
- Frenchie(Unitree Go2四足歩行ロボット):2024年USS Hornet Defense Technology Showcaseで現場任務を達成
- Iris(Unitree G1人型ロボット):EthDenver 2025 Coinbaseブースでライブデモを実施し、RoboStoreの教育プログラムで全米の大学カリキュラムに展開予定
FABRIC: 分散型ヒューマン・マシン協働ネットワーク
どれほど高度なロボットでも、相互信頼の下で安全に協働できなければ、その力は限定的です。現実にはメーカーごとに異なるクローズドシステムで稼働し、スキルやデータ共有、ブランド・国境を越えた協働が困難で、基準や身元保証もありません。主な課題は次のとおりです。
- 身元と位置: ロボットの特定・所在・実行中タスクの把握
- スキル・データ共有: ロボット間で安全に情報共有・能力アクセスを実現
- 制御ガバナンス: 利用頻度・適用範囲・返却条件等の統制
FABRICはこれらの課題を解決する分散型ネットワークで、ロボット・知能システムのための統一ID、タスク、通信、決済機能を提供します。FABRICの主な役割は以下の通りです。
- ロボット向けGPS: 他ロボットの位置や協働可否を特定
- ロボット向けVPN: パブリックIP不要で安全な直接接続
- タスクスケジューリング: タスクの公開・受託・実行記録を自動化
主なユースケース
FABRICはすでに以下の現場アプリをサポートしています。
- 遠隔操作・監視: 特別なネットワーク不要で世界中から安全にロボット操作
- Robot-as-a-Service型マーケット: 清掃・点検・配送などをアプリで手軽に依頼できる
- クラウド型地図作成・データ収集: 複数ロボットが環境データをリアルタイムでアップロードし、高精度マップを共有
- オンデマンドスキャン/マッピング: 現地ロボットで3Dモデリング・建設調査・保険証拠収集等を実施
FABRICは「誰が、どこで、何を、どう達成したか」の証拠の提供と、スキル発動やタスク実行の範囲明確化を実現します。
今後FABRICは、マシンインテリジェンスの「App Store」を目指します。スキルがグローバルに提供・実行され、その利用記録がモデルへ還元され、ネットワーク進化の原動力となります。
Web3がオープン性をマシン社会に組み込む
ロボティクス産業は一部プラットフォームにハード・アルゴリズム・ネットワークが集中し、外部イノベーションを阻害しつつあります。分散化により、構築・運用者を問わず、オープンネットワークでのスキル共有や報酬決済が可能となり、特定プラットフォームへの依存が排除されます。
OpenMindは、協働ルール・スキル権限・決済モデルをオンチェーンで透明・検証可能・アップグレード可能な「ネットワーク秩序」として実装します。
- 検証可能ID: 全てのロボットとオペレーターがユニークなオンチェーンID(ERC-7777標準)を登録、特性・役割・権限を全て透明化
- オープンタスク配分: タスクは公開ルールに基づき入札・マッチされ、協働の全過程が暗号化・時刻位置スタンプ付証跡としてオンチェーン記録
- 自動決済・収益分配: タスク完了後、収益・保険・デポジットが自動リリースあるいは保留、誰でもリアルタイム検証が可能
- スキルのグローバルな流通: オンチェーン契約でスキル利用条件・端末適合性を規定し、知的財産を保護しつつ全世界で提供・実行
この協働基盤はすべての関係者に開かれ、利用・観察・強化が可能です。Web3ユーザーにとって、ロボット経済は非独占・コンポーザブル・監査可能という特性を持ち、「オープン性」がマシン社会の根幹となる貴重なチャンスです。
エンボディド・インテリジェンスに孤立からの突破を
病院のパトロール、学校での学習、都市の地図作成など、ロボットは「実演用デモ」から日常社会に欠かせない存在へ移行しつつあります。彼らは24時間稼働し、規則を守り、記憶や技能を保持し、人や他のマシンとも協働します。
こうした利用拡大には、単なる知能化だけでなく、信頼できる基盤プロトコルによる相互運用・協働性が不可欠です。OpenMindはOM1とFABRICによる土台を築きました。OM1がロボットに世界認識と自律性を与え、FABRICがその能力をグローバルに循環させます。次なる段階は、このインフラを都市やネットワークに拡大し、人間社会の持続可能な信頼パートナーとしてマシンを定着させることです。
OpenMindの戦略:
短期: OM1のコアプロトタイプとFABRICのMVPを完成し、オンチェーンIDとコア協働機能を展開
中期: OM1とFABRICを教育・家庭・ビジネス分野に導入し、アーリーアダプターと開発者コミュニティを醸成
長期: OM1とFABRICをグローバル標準とし、全てのマシンがインターネットのように自由にこのネットワークに参加、持続可能な世界規模マシン経済を推進
Web2時代は、ロボットは独自サイロに閉じ込められ、機能やデータがプラットフォームを跨げませんでした。OpenMindが描く未来では、ロボットはグローバルなオープンネットワークの平等なノードとなり、自由に参加し、学び合い、協働し、決済を行い、人間とともに透明かつ信頼性の高いマシン社会を形成します。OpenMindはこのスケーラブルな変革を実現する存在です。
免責事項:
- 本記事はTechFlowからの転載であり、著作権はオリジナル著者TechFlowに帰属します。転載にご懸念がある方は、Gate Learnチームまでご連絡ください。関連手続きに従い速やかに対応いたします。
- 免責事項: 本記事の見解は著者個人によるもので、投資助言を目的としたものではありません。
- 本記事の他言語版はGate Learnチームが翻訳しました。Gate.comを明記しない限り、本翻訳記事の転載・配布・複製は禁止します。
関連記事


ブロックチェーンについて知っておくべきことすべて

ステーブルコインとは何ですか?

流動性ファーミングとは何ですか?

Cotiとは? COTIについて知っておくべきことすべて
